

서론
Biology technology와 information technology 산업은 국가적 차원에서 우리나라의 미래산업으로 다양한 연구개발이 시도되고 있으며 진행 중이다. 또한, 사회구조와 생활패턴의 변화로 인해 생명 연장과 병치료 및 건강에 대한 사회적 관심이 커지고 고령화에 따른 노인인구의 증가로 인해 의료분야에 대한 관심이 증대되고 있는 실정이다. 이러한 상황에서 보다 더 나은 의료서비스를 제공함으로써 삶의 질을 향상시키고 국민복지 향상의 핵심적 역할을 수행할 수 있는 분야로 최근 의료용 로봇산업이 각광을 받고 있다. 의료 분야에서의 로봇은 정밀성, 다양한 정보의 분석과 응용, 진단기계, 치료기계, 수술, 재활 등 다양하게 이용되고 있다.
의료용 로봇의 연구개발 분야는 크게 수술로봇과 재활로봇으로 나누어 진행되고 있다. 수술로봇에는 수술실에서 집도의사의 명령에 따라 수술을 보조하는 수술보조로봇과 의사를 대신하여 수술과정의 전체 혹은 일부를 의사를 대신하거나 의사와 함께 수술작업을 하는 수술로봇, 수술에 관한 숙련도를 높이기 위하여 가상의 그래픽 환자 모델과 햅틱 장치 등을 이용하여 수술을 연습할 수 있게 하는 수술시뮬레이터로 분류할 수 있다[1].
수술용 로봇의 개발은 미국, 독일, 일본 등의 선진국을 중심으로 연구되어 오다가 그 실현가능성과 상업적 가치가 검증되면서 최근 들어 점차 확대되고 있다. 초기 외과용 수술로봇에 대한 연구개발이 활발히 진행되면서, 미국에서는 300여 개 병원에서 로봇수술을 시행하고 있으며, 국내에서도 미세로봇수술 등이 활발하게 이루어지고 있다.
최근에는 노령인구와 장애인구의 증가로 로봇기술의 필요성은 재활분야에서도 확대되고 있다. 장애인의 독립적인 활동을 보장하고 삶의 질을 높이려는 노력은 유럽 등의 선진국을 중심으로 재활로봇이 연구되어 왔으며, 스위스에서 개발된 보행 재활로봇으로 Lokomat (Hokoma AG, Zurich, Switzerland)이 대표적이다. 또한, 미국에서는 Massachusetts Institute of Technology와 Rehabilitation Institute of Chicago를 중심으로 신경재활로봇들이 활발하게 연구개발되고 있으며, 국내에서는 한국과학기술연구원, 한국생산기술원 및 여러 대학에서의 보행보조로봇 및 보행재활로봇 등을 개발하였다.
이 글에서는 다양하게 이용되고 있는 재활로봇 중 뇌질환 환자들에게 사용되는 로봇치료에 대해 설명하고자 하고, 임상 영역에서 활발하게 사용되기 위한 방안을 제시해보고자 한다.
재활로봇
1. 상지로봇치료
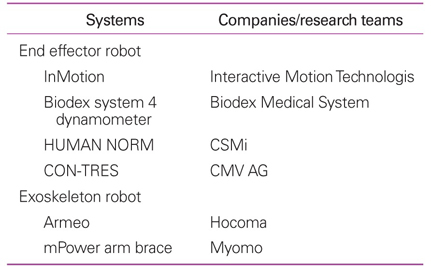
로봇을 이용한 상지재활치료는 운동신경 마비로 인해 스스로 팔이나 손을 움직일 수 없는 환자들의 손과 팔 운동 능력을 로봇의 도움으로 배가 시킬 수 있다. 재활로봇 중 상지로봇은 크게 말단장치로봇(end effector robot)과 외골격로봇(exoskeleton robot)으로 나눈다[2] (Table 1). 초기 상지로봇은 말단장치로봇을 기반으로 발전하였다. 말단장치로봇은 환자의 손이나 팔의 어느 한 부분에 착용하고, 로봇이 생성하는 힘에 의해서 움직이게 된다. 말단장치로봇은 조작이 쉽고 팔 길이에 상관없이 모든 환자에게 쉽게 적용시킬 수 있다는 장점이 있지만, 특정 관절의 토크를 제어하는 것이 불가능하고, 상지의 특정 관절의 단일 움직임(isolated movement)이 어렵다는 단점이 있다. 또한 움직임의 범위가 말단장치에 의해서 결정되기 때문에, 재활운동 시 제한이 있을 수 있다. 따라서 최근에는 이러한 단점들을 보완할 수 있는 외골격로봇 쪽으로 상지로봇이 개발되고 발전해가고 있는 추세이다.
외골격로봇은 사람의 상지와 각 관절 축을 유사하게 만들어서 환자의 팔에 나란히 부착하여 작동하도록 설계되었다. 따라서 여러 위치에서 적용할 수 있으며, 환자의 팔 길이 등에 맞추어서 착용할 수 있도록 제작되고 있다. 또한 로봇 개발사마다 최대한 인간의 동작을 자연스럽게 구현하기 위해서 노력하여 각각의 관절들을 분리해서 작동할 수 있다. 이는 재활치료 시 훈련을 원하는 특정 근육만을 강화하는 운동도 가능하게 하였다. 일부 로봇은 추가적으로 치료 시 저항을 제공하기도 한다.
세계적으로 가장 널리 사용되고 있는 외골격 상지로봇은 Armeo (Hokoma AG, Zurich, Switzerland), mPower arm brace (Myomo Inc, Cambridge, MA, USA) 등이 있다[2]. Armeo는 로봇 팔 센서로 환자의 동작을 인지하고 실시간 화상을 통해 환자의 손, 팔의 움직임을 확인하면서 증가된 피드백으로 스스로 치료 방향을 정한 움직임을 촉진하여 목적이 있는 기능적인 동작을 수행할 수 있게 한다(Figure 1). 이러한 기능은 운동기능 회복을 촉진할 뿐만 아니라 부수적으로 기억력, 집중력, 문제해결 능력, 각성 유지 등의 회복에도 도움이 된다[3]. 이러한 상지로봇은 최근 국내에서도 몇몇 병원에서 도입하여 치료에 활용하고 있다.
상지로봇의 치료효과에 대해서는 많은 연구가 진행되고 있는 상태이나, 대부분의 연구는 만성뇌졸중 환자들을 대상으로 하였으며, 기존의 치료사가 치료하는 방식과 비교하여 더 나은 회복을 보이지는 않았다[4]. 하지만, 상지근력의 회복의 경우 뇌질환 발병 후 급성기에 큰 폭의 회복을 보이기 때문에 급성기 환자를 대상으로 치료 양을 동일하게 조절하면서 로봇을 이용한 치료와 기존의 치료방식을 비교하였을 때는 결과는 예측할 수 없다[5].
2012년 Mehrholz 등[6]에 의해서 발표된 리뷰논문에 의하면 상지로봇을 이용한 재활치료는 환자들의 일상생활 수행능력의 향상을 가져오고 상지의 기능을 좋게 하였으나, 아직까지 상지근육의 근력의 향상을 가져오지 않았다고 보고 하였다. 그러나, 이 논문에서도 언급한대로 이는 치료의 기간 및 정도, 환자의 상태 등을 일치시켜서 얻은 결과가 아니라는 한계가 있다.
2. 하지로봇치료
뇌질환 환자에서 보행기능의 회복은 재활치료의 가장 중요한 목표 중 하나이며 환자의 가정이나 사회복귀에 주요한 영향을 미치는 요인이다. 보행장애를 보이는 환자에 대한 재활치료에 있어 근래에는 환자가 최종 목표로 하는 동작과 최대한 비슷한 운동을 집중적으로 학습하게 하는 운동학습이론(motor learning concept)에 근거한 치료법들이 강조되고 있다[7]. 작업 특이적 훈련(task-specific training)은 이러한 학습이론에 근거한 치료법으로 대표적인 것이 하지에서는 답차보행훈련(body weight-supported treadmill training)이다. 그러나 근력약화가 중증이거나 불수의적인 운동이 있는 환자에게 도수적 보행훈련 및 답차보행 훈련 등을 실시하는 것이 거의 불가능하다. 이러한 어려움을 극복하기 위해 최근에는 보행운동학의 반복적 재연성을 개선하고 운동시간을 증가시킬 수 있는 방법으로 보행훈련을 보조해주는 로봇장치들이 개발되고 있다[8].
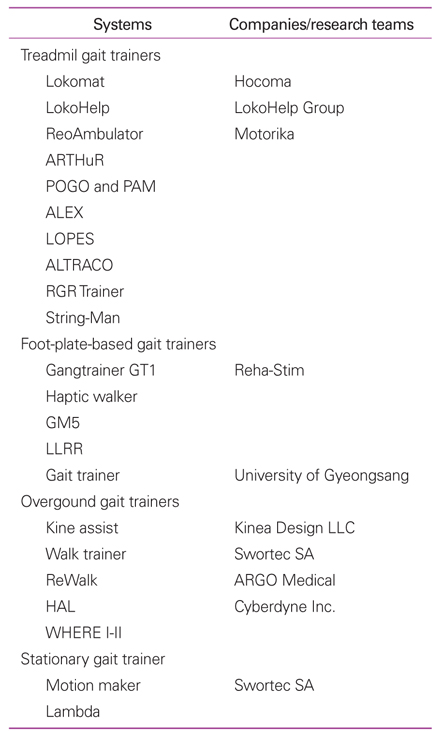
하지 로봇은 크게 트레드밀 보행 트레이너(treadmill gait trainers), 발판 기반 보행 트레이너(foot-plate-based gait trainers), 지상 보행 트레이너(overgound gait trainers), 고정 보행 트레이너(stationary gait trainers), 발목 재활시스템(ankle rehabilitation system)으로 분류한다[9] (Table 2). 이 중에서 전세계적으로 뇌질환 환자의 재활치료를 위해서 가장 널리 사용되고 있는 하지 보행로봇은 Lokomat이다. Lokomat은 최초로 개발된 보행보조로봇으로 미리 프로그램 된 정상 생리적 보행양식에 따라 환자의 하지 움직임을 유도하도록 설계되어 있으며, 그 임상적 효과가 보고되어 있다. 이는 가상현실의 공간을 돌아다니며 즐겁게 치료가 가능하며, 환자의 다리와 하지로봇, 트레드밀 간의 조화로운 움직임을 통해 정상적인 보행을 이끌어내 환자 본인이 독립적이고 주체적으로 치료에 임할 수 있다는 장점이 있다. 또한 치료 내용이 기록되기 때문에 치료 향상도를 정확하게 측정할 수 있어 환자의 기능적 상태에 알맞은 개별적 과제 중심치료로 재활치료를 받는 환자들에게 큰 도움이 될 수 있다. 하지만, Lokomat은 관절 제어부가 고관절과 슬관절에만 있어서 족관절 부위 훈련이 제한적이라는 단점이 있다(Figure 1).
최근 재활로봇에 대한 관심이 증대되면서 우리 나라의 여러 기업들에서도 기존 모델보다 진보된 형태의 재활로봇의 개발에 박차를 가하고 있다. 몇 년 전 우리 나라에서 출시된 Walkbot (P&S Mechanics, Seoul, Korea)은 고관절, 슬관절뿐 아니라 족관절의 훈련까지 가능하게 만든 트레드밀 보행 트레이너 형태의 하지보행로봇이다.
하지보행로봇은 치료실 수준에서뿐만 아니라, 옷처럼 입을 수 있는 외골격로봇의 형태로 제작되어 지상 보행 트레이너(overgound gait trainers) 역할을 하는 로봇들도 사용되고 있다[10]. Rewalk (Argo Medical Technologies Ltd., Jerusalem, Israel)는 대표적인 형태의 외골격 하지보행로봇으로 2012년 5월 하반신마비 환자가 이 로봇을 착용하고 마라톤 풀 코스를 16일만에 완주하면서 세계인의 주목을 받은 바가 있다. 이와 같은 형태의 로봇은 다리에 장착을 하면 외부 골격 부위에 센서와 컴퓨터시스템이 작동하여 무게와 균형의 변화를 탐지하여 작은 모터가 로봇을 움직이게 하는 원리이다[9]. 국내 과학자들도 외국 재활로봇보다 사용이 간편하고 가격도 저렴한 재활로봇을 개발하기 위해서 연구에 매진한 결과, 최근 몇몇 지상 보행 트레이너 형태의 국내 하지보행로봇들이 뉴스 등을 통해서 소개되고 있다. 하지만, 아직 상용화 단계는 아니어서 환자들에게 직접 사용을 해볼 수 없다는 한계는 있으나, 향후 재활로봇 시장이 넓어지고 기술에 대한 연구가 지속된다면, 조만간 상용화된 국산 외골격 하지보행로봇을 만날 수 있으리라 기대한다.
로봇을 이용한 보행 훈련에 대한 관심이 높아지면서 훈련의 대상을 설정하는 것이 하나의 당면과제가 아닐 수 없다. Morone 등[11]의 연구에서 Gait Trainer (GT II; Rehamstim, Berlin, Germany)를 이용해서 아급성기 뇌졸중 환자들을 대상으로 로봇을 이용한 보행훈련을 했을 때 초기근력 저하가 심했던 환자그룹에서 치료효과가 더 좋고 오래 지속된다는 결과를 얻었다. 이는 근력 약화가 중증인 환자에게 로봇 치료가 좀 더 도움을 줄 수 있을 것이라는 기존의 가설들을 입증한 결과라고 볼 수 있다. 또한, 어느 정도의 강도로 로봇을 이용한 재활치료를 하는 것이 좋을 것인가에 대한 논의도 활발하게 이루어지고 있는 가운데, 최근 Hsieh 등[12]이 발표한 연구에서 고강도의 로봇 훈련이 낮은 강도의 훈련이나 대조군보다 운동기능의 향상을 가져왔다고 보고하였다. 이는 작업특이적 훈련을 반복적으로 여러 차례 시행하는 것이 치료의 효과를 높인다는 이전의 학습이론들과 일치하는 결과라고 할 수 있겠다.
3. 로봇을 이용한 이동수단
로봇의 발전은 뇌질환 환자를 위한 치료의 발전을 가져왔을 뿐만 아니라, 이동을 위한 수단의 발전도 가져왔다[13]. 계단을 오르내릴 수 있으며 장애물을 넘을 수 있는 휠체어로봇, 손 쉽게 타고 내릴 수 있도록 개발된 신개념 휠체어로봇 등 로봇을 이용한 새로운 형태의 휠체어 개발은 환자의 편의를 높이고 이동을 자유롭게 만들고 있다. 로봇휠체어의 대표적인 형태인 iBOT 4000 (Independence Technology, Brunswick, GA, USA)은 한 쪽에서 두 개의 전동 바퀴(powered wheel)가 돌면서 계단을 오르고 내릴 수 있도록 고안되었다. 일본에서 선보인 Rodem (Tmsuk Co., Tokyo, Japan)이라는 휠체어로봇은 외관은 스쿠터와 비슷하게 제작되어 기존의 휠체어처럼 바로 앉는 것이 아니라 안장에 걸터앉아 핸들을 잡는 형식으로, 이용자가 다른 사람의 도움 없이도 타고 내리기가 쉽도록 만들어졌으며, 조작은 앞에 놓인 조이스틱으로 하기 때문에 보다 자유로운 조작이 가능해졌다.
성공적인 로봇치료를 위한 고찰
1. 로봇치료의 비용
로봇치료의 가장 큰 장애요인은 이러한 장치들의 높은 비용이다. 아직은 재활로봇의 소비시장이 크지 않기 때문에 대량생산이 가능하지 않으며, 투자유치도 적은 실정이다[5]. 비용억제의 시대에 비싼 장치에 대해서 과감하게 투자할 수 있는 의료기관이 많지 않고, 적용 가능한 적절한 수가가 없는 실정이므로, 이와 같은 높은 비용의 장치들은 대부분 병원의 재정범위 밖으로 두고 관심을 갖지 않는 경우들도 많다. 그러나 로봇치료는 일대일 치료시간의 의존을 줄여 보조인력을 줄일 수 있다는 장점이 있고, 착용 로봇장치의 사용은 다양한 작업을 가능하게 하여 사회로의 복귀를 촉진할 수 있어 사회적 기대비용을 줄일 수 있을 것이다[14]. 또한, 보다 현실적인 가상환경을 제공할 수 있고, 환자에게 실시간 피드백을 줌으로써 치료의 효과를 높일 수 있다는 장점을 가진다. 이처럼 로봇을 이용한 재활치료의 장점들을 잘 이해하고, 보편화를 위해서 저렴하면서 좋은 로봇을 개발하기 위한 노력이 필요하겠으며, 국제의료시장을 겨냥한 국가적 지원 및 기업의 참여가 중요하겠다[1].
2. 로봇치료의 효과
로봇치료가 굉장히 고비용의 치료라고 하더라도 획기적인 치료효과를 낸다면 비용대비 효율적인 측면에서 좋은 치료로 평가될 수 있을지도 모른다. 그러나 아직 로봇치료는 기존의 재활치료를 대체하지는 못하며, 보조적인 치료방법으로만 사용되고 있다. 뇌질환 영역에서 운동능력 및 인지기능 등을 회복시키는 역할을 하기는 하지만, 아직 그 효과나 기전이 명확하게 입증되지 않았고, 기존의 연구들이 작은 규모로 이루어진 경우가 많아서 비용대비 효율을 고려할 때 부정적인 입장을 표명하는 이들도 적지 않다[5]. 이런 이유로 로봇치료를 통한 신경학적 회복 및 기능적 회복의 효과와 기전을 명확하게 입증하는 것도 향후 재활로봇 개발과 더불어 로봇치료 영역의 궁극적 발전을 위해서 관심을 두어야 할 부분이다.
3. 포괄적인 치료가 가능한 로봇의 개발
현재까지 개발된 로봇은 대부분 특정한 관절운동 및 특정 기능을 목표로 개발되어 이용되고 있다. 재활치료는 환자의 모든 기능 저하를 포괄적으로 치료하는 것을 목표로 하기 때문에, 로봇치료가 재활치료 영역에서 그 입지를 넓히기 위해서는 여러 프로그램을 가지고 있어 다양하게 활용할 수 있는 로봇의 개발 역시 중요하다[5]. 비용, 노동력 측면에서 효율을 고려할 때도 한 가지 로봇이 여러 역할을 수행할 수 있을 때, 비용의 절감, 인력의 절감이 가능하며 다양한 환자군에 적용하여 사용할 수 있을 것이다.
결론
재활로봇은 최근 몇 년 사이 비약적인 기술의 발전을 보였고, 현재도 급격하게 발전하고 있는 단계이다. 하지만, 재활치료 영역에서 임상적으로 사용하는 것에는 여러 이유로 제약이 있다. 지속적인 기술에 대한 개발과 개선, 치료효과에 대한 더 많은 데이터의 구축이 이루어진다면 임상 영역에서 활발하게 사용될 수 있는 잠재력을 가진 영역임이 틀림없다. 궁극적으로 로봇치료는 기존의 치료가 가지는 단점을 극복하고 최적의 재활치료가 가능할 수 있도록 하는데 도움이 될 수 있을 것이다. 과학자들의 기술개발과 의료진의 활발한 임상연구, 기업과 국가적 차원의 투자가 조화를 이루어 선진 재활로봇 분야를 이루어가기 위한 노력이 필요하겠다.
Peer Reviewers' Commentary
본 논문은 최근 그 중요성이 증가되고 있는 의료용 로봇을 뇌질환의 재활분야에서 어떻게 적용하고 있는 지 소개하고 있으며, 현재까지 뇌질환에서 상지와 보행에 대한 로봇 재활치료 효과의 학문적 근거와 제약점을 기술하고 있다. 필자가 지적했듯이 뇌질환에서 로봇 재활치료에 대한 관심과 중요성이 증가되었고, 그 치료효과에 대해서도 많은 기대를 하고 있지만 아직까지 그 효용성에 대해서 결론짓기는 어렵다. 뇌질환에서 로봇 재활치료가 임상적으로 널리 활용되기 위해서는 우선적으로 기존의 치료보다 우월하다는 학문적 근거가 축적되어야 하며, 치료효과를 기대할 수 있는 환자군의 특성, 치료의 적용시기, 비용-효과 측면의 분석, 가상현실과의 병합치료, 환자의 만족도 등에 대한 후속연구가 더 많이 이루어져야 할 것이다.
[정리: 편집위원회]